This graduation project focuses on the development of an autonomous vehicle simulator, aiming to create a testing software that simulates the experience of autonomous vehicle capabilities before their deployment on public roads. The objective is to design a comprehensive and realistic simulation environment that allows thorough evaluation and validation of autonomous driving algorithms and systems.
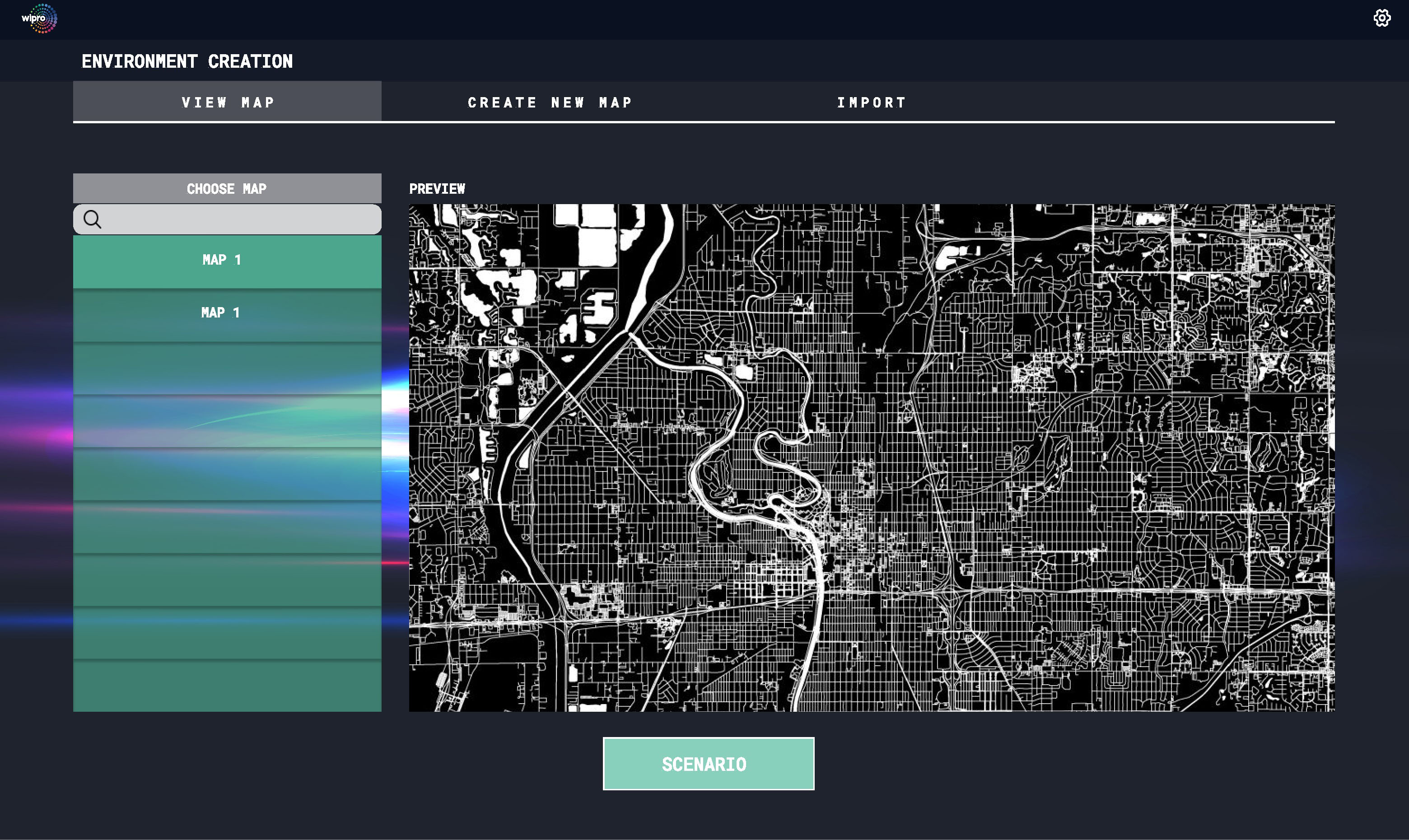
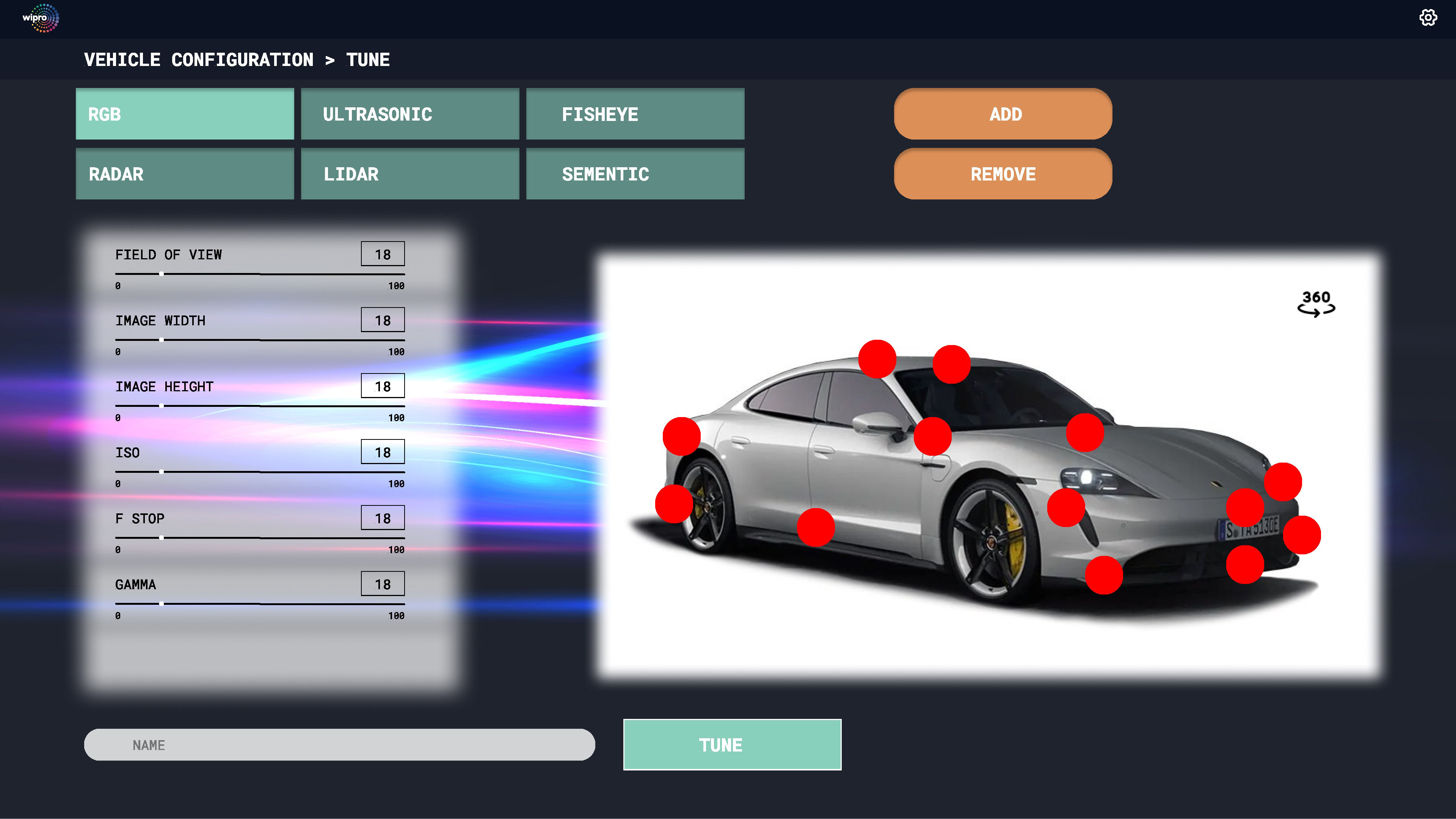
The simulator incorporates various components, including virtual vehicle models, sensor models, environment models, and realistic driving scenarios. These components work together to replicate real-world driving conditions, enabling engineers and researchers to test and refine autonomous vehicle algorithms in a controlled and safe environment.
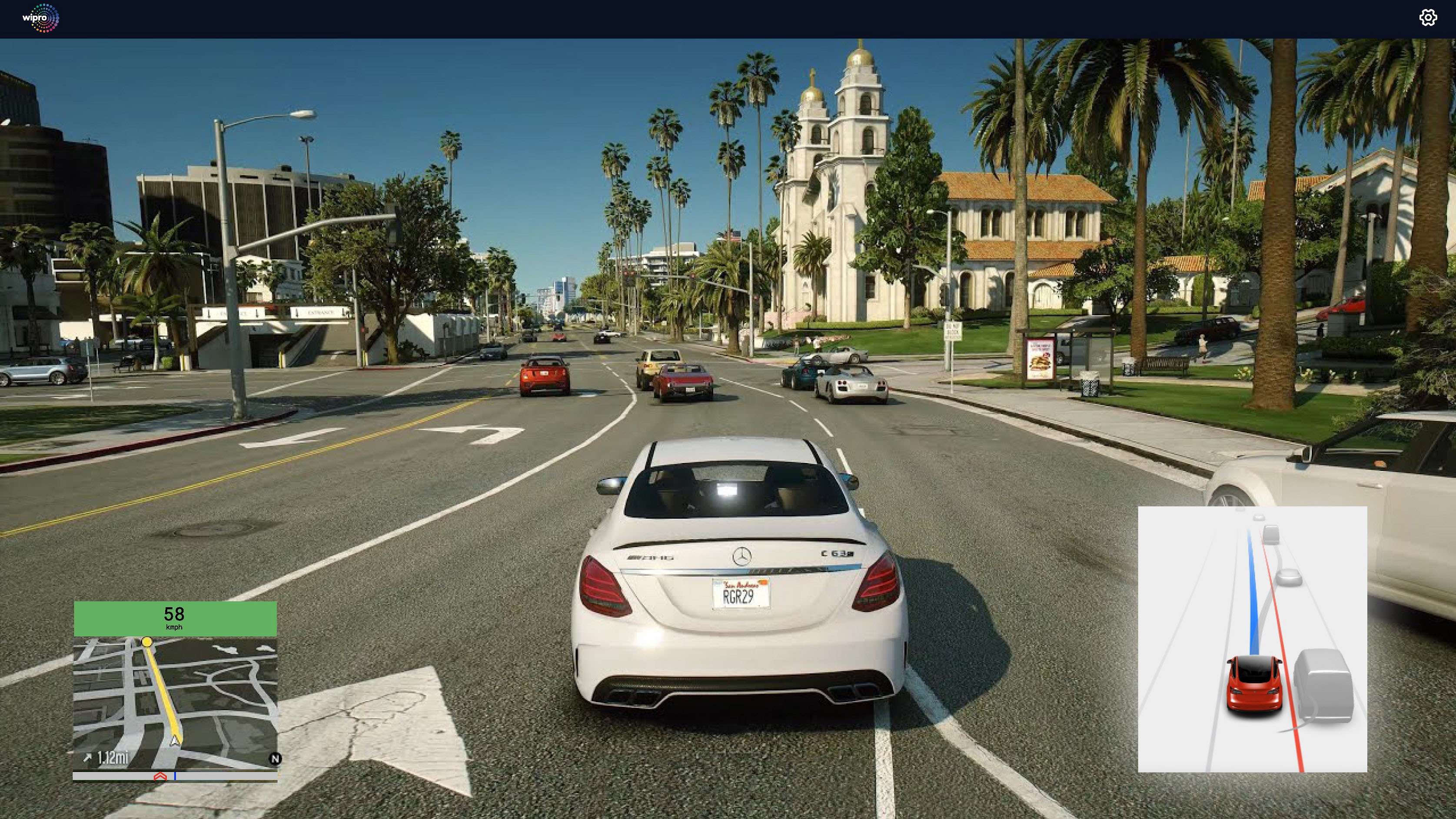
The simulation software provides a range of functionalities, including the ability to simulate sensor inputs such as LiDAR, radar, and cameras, as well as realistic vehicle dynamics and interaction with the environment. Users can define and modify specific scenarios, such as urban driving, highway navigation, and adverse weather conditions, to assess the performance of autonomous driving systems under different circumstances.
By utilizing the autonomous vehicle simulator, developers and researchers can assess the vehicle’s decision-making capabilities, evaluate its response to various scenarios, and identify areas for improvement. The simulator also allows for extensive data collection, enabling the analysis of algorithms, sensor fusion techniques, and perception systems to enhance the overall performance and safety of autonomous vehicles.
This graduation project provides a valuable contribution to the field of autonomous driving by creating a robust and reliable testing software. The simulator serves as a critical tool for researchers and developers in reducing the reliance on real-world road testing, thereby saving time and resources while ensuring thorough evaluation of autonomous vehicle capabilities.